こんにちは。パロアルトインサイト、データサイエンティストの辻です。今回はMOCCの代表的なオンライン講座Udacityのロボティクスコースのレビューを書きたいと思います。MOCCとはMassive Open Online Courseの略で、場所、時間に関係なく受講が可能なので仕事をしながら新しいことを学ぶのには非常に便利です。アメリカでは多くの有名大学もMOCCでの講義を公開しており、すでに多くの受講者がオンライン上でクラスを取りスキルアップをしています。
今回私が受講した「Robotics Software Engineer Nanodegree」とはその名の通りロボティクス関係のソフト開発者を目指す人を主に対象としたコースです。受講理由は普段仕事で扱っているデーターサイエンスや機械学習の技術をロボティクスのエリアに応用することで仕事の幅を広げられると考えたらかです。このコースは2部構成となっておりその第1部についての感想を書きたいと思います。
第1部ではロボティクスの基本的な要素をカバーしている内容となっていて、ロボット用ソフトウェアプラットフォームのROS(Robot Operating System)の基礎をカバーしその後にKinematics, Perception, Control, Deep learningを学ぶ運びになっています。その各分野の説明と行ったプロジェクトの紹介を行います。
1. サーチ&サンプルリターン
ROSとロボティクスの基本的要素を学ぶためのプロジェクトで、the Nasa Sample Return Challengeを元に作成されました。このプロジェクトでは地表探索型ロボットを制御して、探索をしながら隕石を採取するプログラムの一部を実装します。ゴールは以下の2つの条件をクリアすることです。
– 全エリアの40%以上のマップを、60%以上の精度で探索する
– 最低1の隕石を見つけてマップに表示させる
これらのゴールを達成するために、ロボットのカメラらから得られる画像に処理を行い、地表、隕石、それ以外の物体を仕分け、物体を検知します。その後画像の較正技術、幾何学変換などを行い取得した画像をマップ座標に落とし込むプログラムを書きます。
図表1:カメラ画像の校正とシミュレーション画面
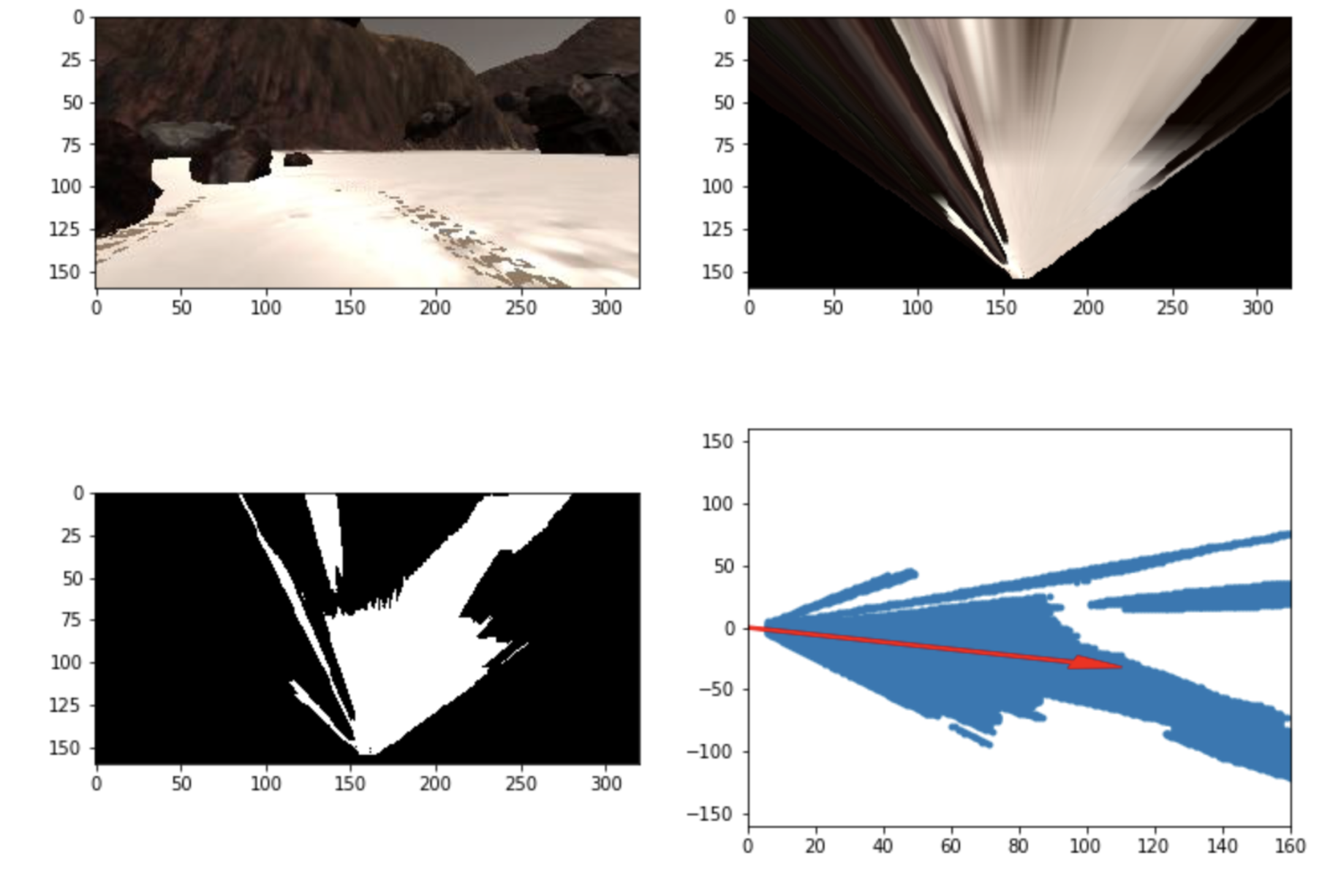

このプロジェクトではROSの操作とデータの取得、変換、それを元にアクションを起こすという一連の流れを掴むことができ、非常にわかりやすくステップが説明されていて、初心者にもわかりやすいデザインになっていました。
2. Robotic Arm: Pick & Place
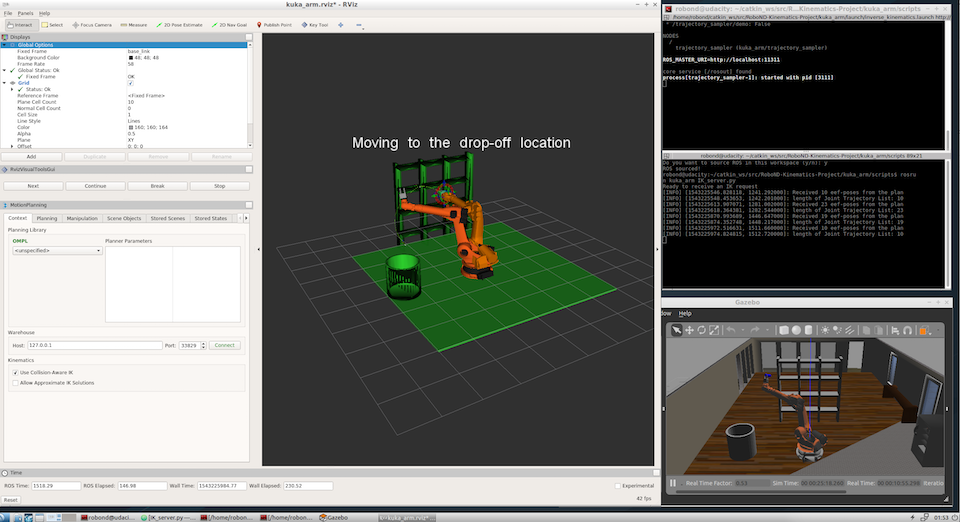
Kinematicsとは運動学を意味する言葉で、ロボットの手足などの役割をする部分の設計に関する分野を表します。このプロジェクトではGazebo, RViz, Moveit!などのソフトを使用してロボットの腕の動きを学び、棚に置かれた缶をロボットの腕で掴んでゴミ箱まで運ぶ制御プログラムを書きます。このプロジェクトのゴールは10回のトライアル中8回以上缶をゴミ箱に入れることに成功することです。
図表2:ロボット運動学のデザイン
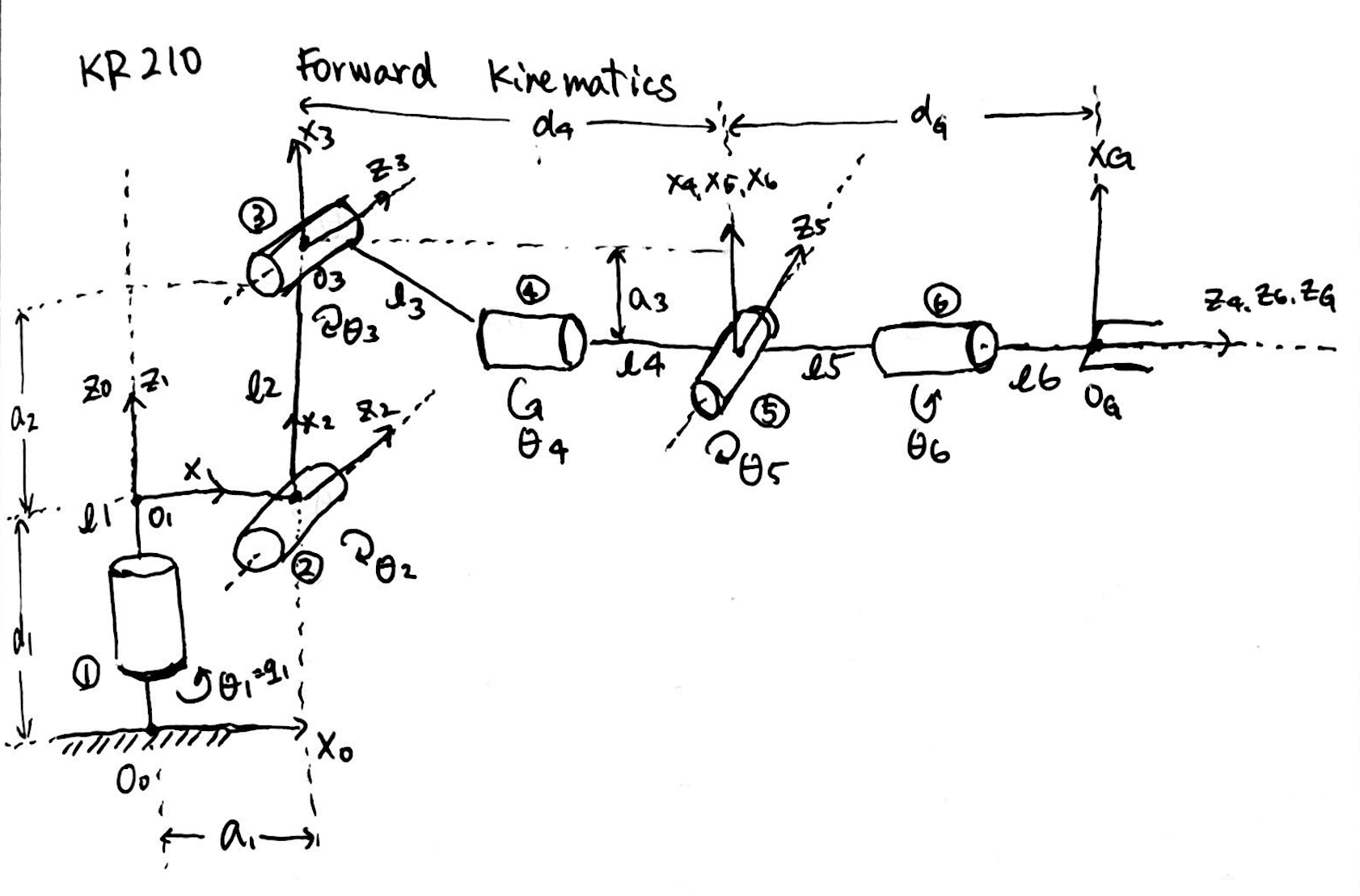
ロボットの掴みの位置情報は各関節の長さ、関節同士の角度で決まります。ロボットの腕を制御するためには、どの操作をすればロボットの掴みの位置がどこにあるのかを計算したり、逆にロボットの掴みが特定の位置にある場合、各関節の位置を逆計算してプランニングしたりする必要があります。このプロジェクトは数学的要素が非常に多く、数学が好きな私には非常に興味深く受講できました。
3. Object Recognition
Object Recognitionとは物体検知のことでセンサーから取得したデータ(画像、音波など)を使って物体の形をロボットに認識させる機能のことを指します。このプロジェクトでは3Dクラウドポイントの技術と機械学習の技術を使い、カメラに映る物体を認検検知させる機能を実装しました。
図表3:物体検知結果と混合マトリックス
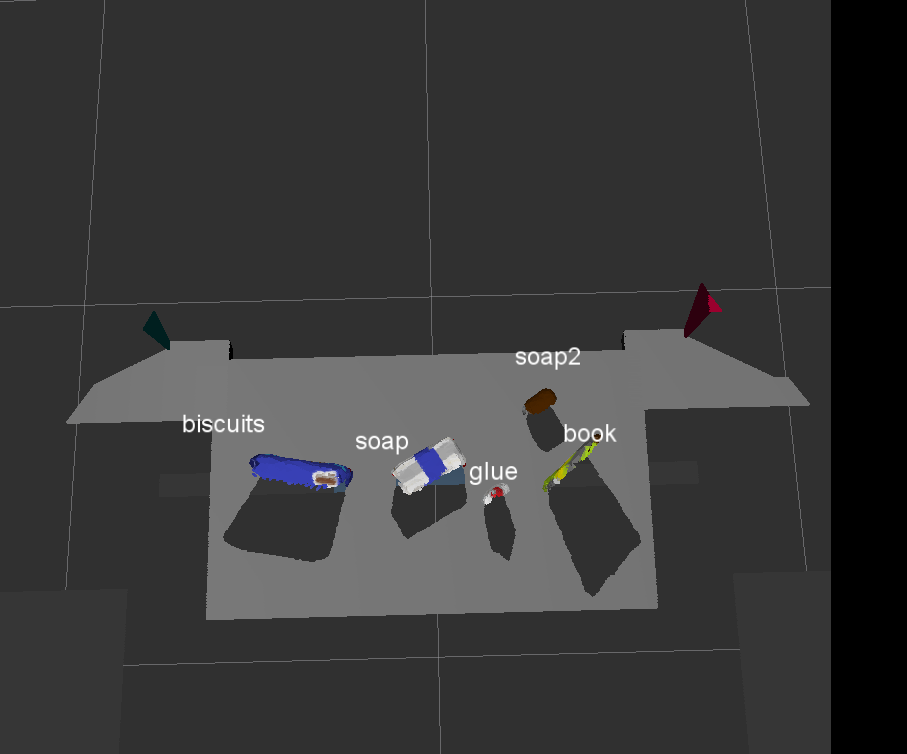
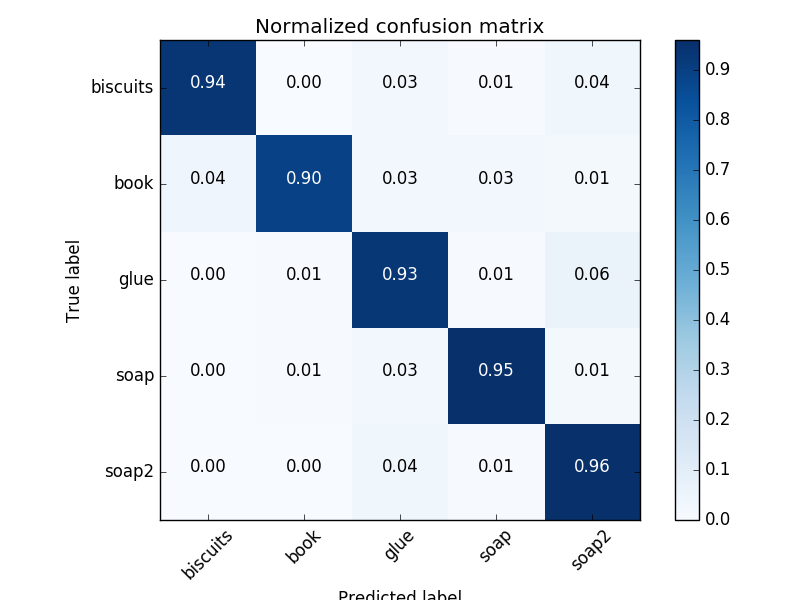
このプロジェクトは機械学習プロセスがコアな部分になっていて技術的には既に知っている内容なため、私には比較的簡単な内容だったのですが機械学習の技術がどのようにしてロボティクスに使用されているのかを学ぶには非常に良い機会でした。
4. Fully Convolutional Networks
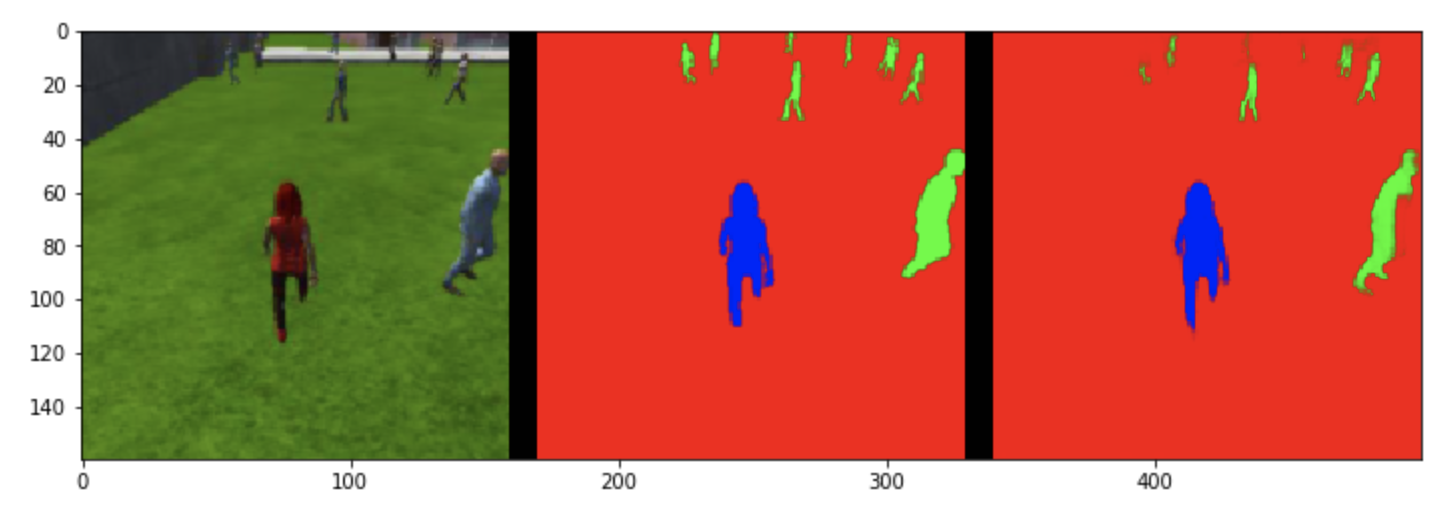
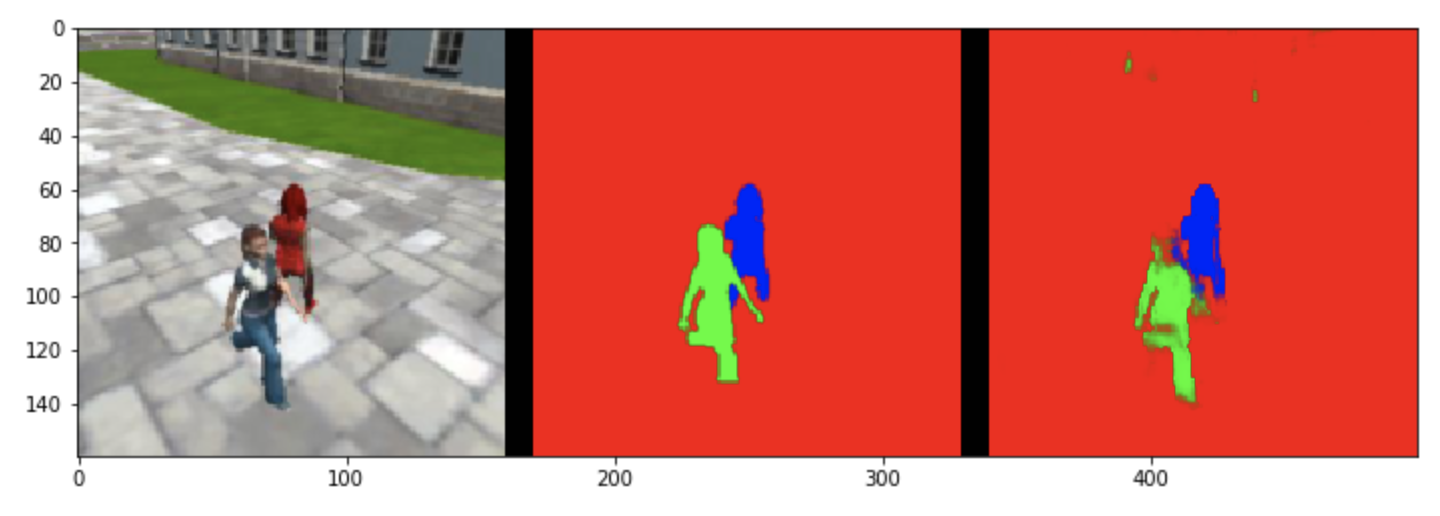
Fully Convolutional Networksはディープラーニングのモデルの1つでカメラ画像を目的に合わせたカテゴリーに分類することができるモデルです。例えば自動運転における歩行者を見分け、走行可能な部分を抽出するような技術として使用されています。このプロジェクトでは自動車の代わりにドローンを使い、ターゲットの人物を追いかけるモデルを作ることがゴールです。学習用のドローン撮影画像をソフトで作成し、それを使ってターゲットとなる人物をたくさんの人の中から見つけ出し、自動で後をつけられるプログラムに実装します。ニューラルネットワークにより、自動で色付けがされている様子が以下の図です。
図表4:ディープラーニングで認識された人
以上がUdacityロボティックスの前半コースのレビューです。全体的な感想は概念的なことよりもよりも実践に重きを置いたコースで、すぐに自分でロボットをデザインしてみたい人や、ロボティクスに興味があってビジネスの場で使用されているソフトを使いながら学びたい人には良いコースだと思いました。改善点を挙げるとすればプロジェクトではカバーされたなかったPID制御などの概念などはもう少し詳しく紹介してプロジェクト化されていても良かったのではないかと思います。その辺りはもう少し自習してみたいと思います。
PID = Propotional=integral-Differential Controllerの略
AIの活用提案から、ビジネスモデルの構築、AI開発と導入まで一貫した支援を日本企業へ提供する、石角友愛氏(CEO)が2017年に創業したシリコンバレー発のAI企業。
社名 :パロアルトインサイトLLC
設立 :2017年
所在 :米国カリフォルニア州 (シリコンバレー)
メンバー数:17名(2021年9月現在)
パロアルトインサイトHP:www.paloaltoinsight.com
お問い合わせ、ご質問などはこちらまで:info@paloaltoinsight.com

2010年にハーバードビジネススクールでMBAを取得したのち、シリコンバレーのグーグル本社で多数のAI関連プロジェクトをシニアストラテジストとしてリード。その後HRテック・流通系AIベンチャーを経てパロアルトインサイトをシリコンバレーで起業。東急ホテルズ&リゾーツのDXアドバイザーとして中長期DX戦略への助言を行うなど、多くの日本企業に対して最新のDX戦略提案からAI開発まで一貫したAI・DX支援を提供する。2024年より一般社団法人人工知能学会理事及び東京都AI戦略会議 専門家委員メンバーに就任。
AI人材育成のためのコンテンツ開発なども手掛け、順天堂大学大学院医学研究科データサイエンス学科客員教授(AI企業戦略)及び東京大学工学部アドバイザリー・ボードをはじめとして、京都府アート&テクノロジー・ヴィレッジ事業クリエイターを務めるなど幅広く活動している。
毎日新聞、日経xTREND、ITmediaなど大手メディアでの連載を持ち、 DXの重要性を伝える毎週配信ポッドキャスト「Level 5」のMCや、NHKラジオ第1「マイあさ!」内「マイ!Biz」コーナーにレギュラー出演中。「報道ステーション」「NHKクローズアップ現代+」などTV出演も多数。
著書に『AI時代を生き抜くということ ChatGPTとリスキリング』(日経BP)『いまこそ知りたいDX戦略』『いまこそ知りたいAIビジネス』(ディスカヴァー・トゥエンティワン)、『経験ゼロから始めるAI時代の新キャリアデザイン』(KADOKAWA)、『才能の見つけ方 天才の育て方』(文藝春秋)など多数。
実践型教育AIプログラム「AIと私」:https://www.aitowatashi.com/
お問い合わせ、ご質問などはこちらまで:info@paloaltoinsight.com
 |
 |
※石角友愛の著書一覧
毎週水曜日、アメリカの最新AI情報が満載の
ニュースレターを無料でお届け!
その他講演情報やAI導入事例紹介、
ニュースレター登録者対象の
無料オンラインセミナーのご案内などを送ります。
 いまこそ知りたいDX戦略 自社のコアを再定義し、デジタル化する
いまこそ知りたいDX戦略 自社のコアを再定義し、デジタル化する  “経験ゼロ”から始める AI時代の新キャリアデザイン
“経験ゼロ”から始める AI時代の新キャリアデザイン  いまこそ知りたいAIビジネス
いまこそ知りたいAIビジネス